project: Racesimulator met drie vrijheidsgraden
In dit project is een racesimulator met drie vrijheidsgraden ontworpen. Dit is een eindwerk van het zesde leerjaar elektromechanica dat gespreid werd over twee schooljaren en is in samenwerking gemaakt met de afdeling hout en de afdeling lassen.

|
|
Dit project is uiteraard enkel geschikt als eindwerk voor het 6de jaar en als project voor hogeschoolstudenten. Daar dit een zeer complex project is hou ik de beschrijving kort en vraag ik geïnteresseerden mij te contacteren via het contactformulier op de pagina "contact".
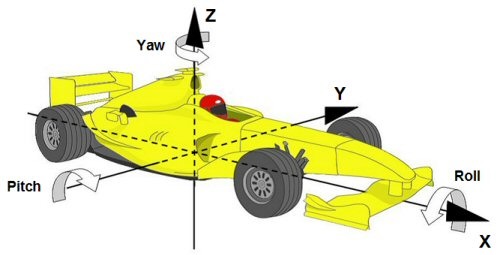
De racesimulator is een elektromechanische opstelling die de bewegingen van een auto in een racespel nabootst en dit over drie vrijheidgraden:
De racesimulator is een elektromechanische opstelling die de bewegingen van een auto in een racespel nabootst en dit over drie vrijheidgraden:
- de roll-vrijheidsgraad
- de pitch-vrijheidgraad
- de yaw-vrijheidsgraad
De roll- en pitchvrijheidsgraad worden elk aangedreven door een driefasige SEW-inductiemotor met spelingsvrije reductiekast uitgerust met een rem. Deze motoren hebben een toerental van 14tr/min en een koppel van 200Nm. De positie van de motoren wordt terugggekoppeld via een rotary encoder van SICK.
De yaw-vrijheidsgraad wordt aangedreven door een driefasige SEW-inductiemotor met wormwielreductiekast. Deze motor heeft een toerental van 10 tr/min en een koppel van 220Nm. Positiebepaling is hier niet nodig.
De motoren worden aangestuurd door drie G110-frequentieomvormers van Siemens.
De sturing bestaat uit een Beckhoff CX9010 PLC met de nodige in- en -uitgangsklemmen en een VM140-Vellemankit.
X-sim software zorgt voor de communicatie tussen het racespel en de Vellemankit.
Zoals reeds gezegd is dit een complex project. Geïnteresseerden vraag ik dan ook contact met mij op te nemen via de pagina "contact". Hieronder is wel al een link te vinden naar een google drive map met de technische tekeningen van dit project getekend door mijn collega's technisch tekenen.
De yaw-vrijheidsgraad wordt aangedreven door een driefasige SEW-inductiemotor met wormwielreductiekast. Deze motor heeft een toerental van 10 tr/min en een koppel van 220Nm. Positiebepaling is hier niet nodig.
De motoren worden aangestuurd door drie G110-frequentieomvormers van Siemens.
De sturing bestaat uit een Beckhoff CX9010 PLC met de nodige in- en -uitgangsklemmen en een VM140-Vellemankit.
X-sim software zorgt voor de communicatie tussen het racespel en de Vellemankit.
Zoals reeds gezegd is dit een complex project. Geïnteresseerden vraag ik dan ook contact met mij op te nemen via de pagina "contact". Hieronder is wel al een link te vinden naar een google drive map met de technische tekeningen van dit project getekend door mijn collega's technisch tekenen.
